[ nodar sdk ]
Software Development Kit
Download. Integrate. Deploy.
Build high-performance 3D perception solutions in minutes with NODAR's production-ready stereo engine and your own cameras.
Choose a license or download a free trial and start integrating today.
Production pricing available — with licensing starting as low as $150/stereo camera.
What's Included
Patented calibration and stereo matching technology for unparalleled accuracy and long-range stereo camera sensing
Occupancy map and object detection GridDetect software (optional)
Precompiled Hammerhead SDK for x86 and ARM
NODAR Viewer for depth and point-cloud visualization
C++ and Python APIs
Full developer documentation
Is time a limiting factor?
We can process your images for you, typically in just a week. Send us your stereo camera pair data and we will deliver production-ready depth maps built with the same pipeline powering our SDK.
Inputs
Your Existing Cameras
Left Image
Right Image
NODAR SDK
Autocalibration
Compensating for camera vibrations every frame with subpixel accuracy
Stereo Matching
Geometric calculation of depth for every pixel
Occupancy Mapping
Particle filter and fusion layer
Your Computer
(NVIDIA Orin, x86+NVIDIA GPU)
Outputs
Recitifed Images
Object List
Occupancy Map
Display your outputs in real time
Download
Integrate
Deploy
Developer Resources
All the resources, tools, and support needed to integrate our cutting-edge stereo vision software into your hardware solutions. Whether you’re building autonomous systems or innovative imaging products, we’re here to help you create the future.
Testimonials
If someone showed us a lidar with such performance, it would be a no-brainer to move forward with integration.
Global Tractor Supplier
In a head-to-head trial with all other multi-camera competitors, NODAR provides the most accurate and only real-time wide-baseline stereo vision system. All other systems compared to NODAR were post-processed due to the high computational load.
Global Automotive OEM
We have been working on stereo for decades and your system is impressive.
Global Automotive Tier 1 Supplier
Applications
Trucks
Ultra long-range, small object detection - detect a 25cm object at 305m to allow for time to stop or avoid.
Passenger Cars
Air Mobility
Long-range detection in any direction improves safety.
Heavy Equipment
Resilience to dust and high-vibration, and best-in-class performance in low visibility.
Ferry
Robustness with moving horizon and ultra-fine precision at short distances for docking.
Rail
1000m+ range obstruction detection for collision avoidance and mapping.
Last Mile Delivery
Low-cost, flexible camera mounting, low compute and fine precision - perfect for mobile robots.
Robotaxi
Sensor fusion with lidar provides redundancy while enabling safe highway driving.
Agriculture
Resilience to dust and vibration for autonomous operation, and precision for spout alignment.
NODAR SDK Benefits
The NODAR SDK provides accurate, reliable depth perception in real-world conditions including dust, low light, rain, and fog. Powered by patented auto-calibration algorithms, it transforms stereo image inputs from existing cameras into consistent, high-resolution depth data with minimal setup, enabling scalable, cost-effective integration across diverse platforms and use cases.
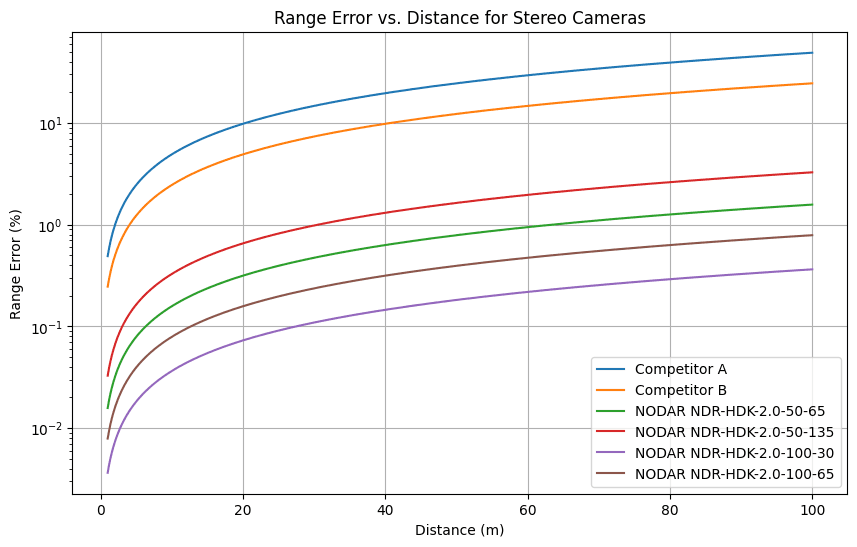
Accuracy and Range
High accuracy by computing the true depth of every pixel based on stereoscopic parallax rather than crudely interpolating from known objects.
Low Visibility Performance
High performance in difficult conditions such as high-dust, low-light, rain, fog, and direct sunlight.
Consistency of Results
Patented auto-calibration technology actively compensates for camera perturbations due to wind, road shock, vibration, and temperature.
Ruggedness and Reliability
High longer-term reliability due to continuous calibration.
Easy Installation
Quick setup with a single software installer and thorough documentation.
Value
No need for expensive new hardware - the SDK can be used with existing cameras.