Tracking a Frisbee at 50 Meters: A Starting Point for Drone Detection


The small drone problem is not a detection problem. It is a geometry problem.
Radar can see large objects well. But it’s wide beam makes it unreliable finding finding objects that are close to the ground or treeline. RF detection works when a drone is broadcasting. LiDAR resolves geometry precisely but at significant cost, power consumption, and with an active emission signature that works against the purpose. None of these were designed for a 25cm quadcopter flying low and fast against a cluttered background. The result is a documented gap: Class 1 drones, in their approach phase, are difficult to track reliably with any single existing sensor.
We have been building into that gap using stereo vision.
The Test: A Frisbee, Because Why Not
Here is the honest version of how this started: someone grabbed a frisbee.
We did not set out to run a formal drone detection trial. We wanted to push the pipeline, see what it could handle, and have a bit of fun doing it. A frisbee is small, fast, and easy to throw repeatedly. It costs nothing. And it turns out to be a reasonable proxy for what we actually care about. And it doesn’t need FAA approval or annoy the neighbors.
At roughly 25 centimeters across, moving at 10 meters per second, it approximates the size class and speed envelope of a small consumer quadcopter. It presents the same low-contrast-against-sky challenge that makes small drones hard to track optically. And it does not emit anything detectable. We could have used an actual drone, and we will. But as a first experiment to stress-test the system, a frisbee got us some interesting results.
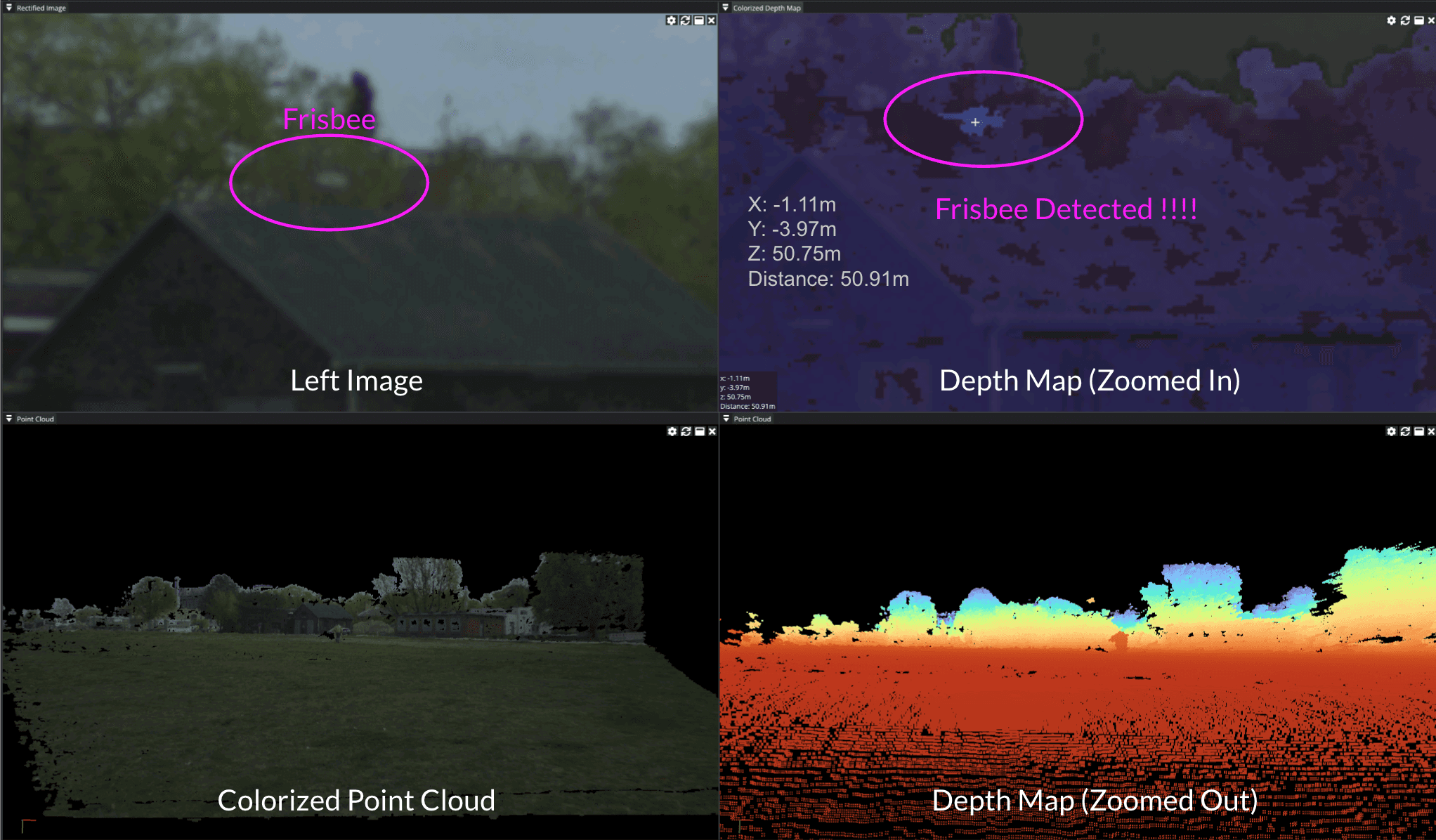
The conditions were not controlled or favorable. One deliberate choice: the frisbee was dark brown. Not a bright disc against the open sky but something that disappears against a building facade or a treeline. The kind of target a detection system would most likely miss. The cameras were mounted outdoors in a windy environment, enough wind that the rigs were physically shaking during recording. The target was at 50 meters. At that distance, the frisbee occupies 8 by 12 pixels in the frame.
That is not much to work with. Most perception systems have a quiet failure mode at this pixel count: not a crash, just an inability to commit to a detection. The pipeline produced a full 3D position in real time: X -1.11m, Y -3.97m, Z 50.75m. Distance 50.91m.
Why This Is Harder Than It Looks
Three things make long-range small-object detection genuinely difficult for stereo vision systems.
Baseline length vs. real-world flex. Depth precision in stereo vision scales with baseline length, the physical distance between camera pairs. Longer baselines give better range precision, but they also flex, vibrate, and drift thermally in the field. Most deployed stereo systems use short baselines because maintaining calibration accuracy on longer ones is hard. Our pipeline runs frame-by-frame autocalibration, which means we can actually use the baseline length we deploy with. The frisbee test used a 1m baseline. Deployment configurations extend to 2m and beyond.
Edge real-time at range. Most published long-range stereo work runs on workstation-class compute with high latency. That is not deployable on a vehicle, a mast, or a portable perimeter system. Our entire pipeline runs on edge hardware with no workstation in the loop, no cloud, and no latency that lets a target pass before the detection fires.
Disparity resolution on small targets. At 50m with a 1m baseline, achieving sub-meter depth precision requires 0.25-pixel disparity resolution. That demands a robust disparity pipeline that does not break down when the target is 8 by 12 pixels and moving fast.
What the Results Actually Prove
The 50m frisbee result is a proof of the disparity pipeline under realistic conditions: windy, outdoors, a small, dark moving target, edge hardware. It is not a claim that this is a deployable counter-UAS system. It is a claim that the core sensing problem is solvable with stereo vision, and that the architecture handles the hard parts.
That distinction matters when you consider the alternative. A neural network approach on the same test would have produced many frames with missed detections. We had only a few. The difference is not architecture or training data. It is the underlying method. Neural networks look for learned visual features. Our pipeline looks for geometry. A dark frisbee at 50 meters against a building is almost invisible to a feature-based detector. To a stereo disparity pipeline, it is a point in 3D space.
It is worth being clear about what we are not claiming. Detection was not reliable across every frame. The frisbee is a proxy, not a quadcopter, and we have not yet run the test that closes that gap. Those are honest limitations, and they are next on the list.
What the test did establish: the pipeline can resolve a sub-30cm target at 50m range in real time on edge hardware, against a challenging background, and at pixel sizes where most alternatives would not produce reliable output.That is the result we needed before moving to the next experiment.
Where This Goes Next
The frisbee test used a 60-degree field of view and a 1m baseline. Those are starting parameters, not deployment parameters. The geometry scales directly.
A 2m baseline with 30-degree optics yields sub-meter depth precision out to approximately 200m on the same target class. With 10-degree optics, the envelope extends to approximately 360m. Those are the ranges that matter for perimeter security, infrastructure protection, and mobile platform deployment.
The next steps are straightforward. Repeat the test with a narrower field of view and a pan-tilt mount. Test against an actual Class 1 quadcopter to close the proxy gap. Characterize performance in low light, against cluttered backgrounds, and in adverse weather, because knowing where the system struggles is as important as knowing where it works.
The architecture is designed to scale with optics. Swapping lenses changes the detection envelope. The pipeline, the autocalibration, and the edge compute stack stay the same.
The Broader Point
This is what iterative development looks like for us. We find something that approximates the problem, try it out, see what the system does, and learn from it. The dark frisbee result was better than we anticipated, which means we are ready to make the experiment harder.
Stereo vision sits in a real gap in the current sensor stack for small drone detection. It is passive, geometrically grounded, and runs on hardware that goes where the problem is. The frisbee test is evidence that the disparity pipeline can handle the target sizes and ranges the problem demands at pixel counts where neural networks would be unreliable.
The sensing problem has an optical solution. And we are building it.
—————
For this test we used NDR-HDK-2.0-100-65-A. Check out the full specs here.
Interested in testing NODAR's stereo vision pipeline for your application? Reach out to start the conversation.