
Real-time 3D vision for critical airspace
NODAR's FlightView brings automotive-proven 3D sensing to aviation, delivering real-time obstacle detection at ranges up to 1,000 m and generating a complete depth map of the flight environment 10 times per second — in any lighting condition, without manual calibration.
1000m
Detection Range
Detects buildings, trees, and other aircraft at ranges up to 1,000 m
10fps
Real Time Processing
Generates a new complete 3D obstacle map 10 times per second.
50million
Depth measurements per second
Dense, per-pixel 3D sensing with no interpolation gaps
FlightView Benefits
Long-range hazard detection
Detects obstacles at ranges up to 1,000 meters, providing pilots with the reaction time needed to maneuver safely at operational speeds.
Continuous 3D hazard awareness
Provides real-time, high-resolution 3D mapping of the flight environment, enabling both immediate collision warnings and longer-term situational awareness for the pilot.
Reliable in extreme conditions
Operates in high-speed, high-vibration airframe environments with continuous autocalibration that maintains accuracy without manual intervention.
Dense 3D output
Computes depth for every pixel in the image, producing a complete 3D reconstruction of the flight environment with no interpolation gaps — enabling detection of thin hazards such as power lines at ranges up to 250 m.
Environmental resilience
120+ dB HDR sensors maintain reliable imaging in direct sunlight, low-light conditions, and dawn/dusk transitions — without degrading stereo matching quality.
Vibration-resistant calibration
Patented per-frame autocalibration continuously corrects stereo alignment under engine vibration and airframe flex, eliminating the need for manual recalibration during operation.
Warnings When It Matters
FlightView overlays detected obstacles on a cockpit display with real-time distance labels, evaluates each against the aircraft's trajectory to compute time-to-collision, and triggers an audible warning automatically when a threshold is exceeded.

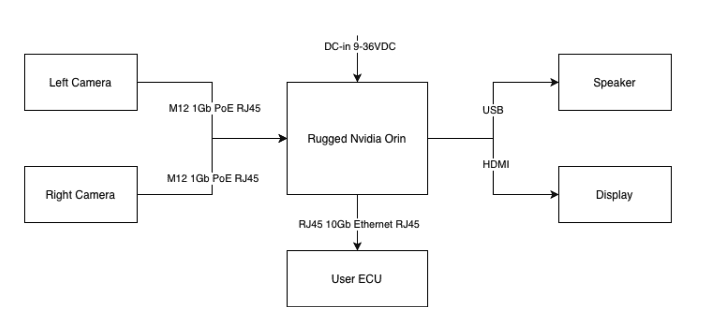
System Architecture
FlightView is built on the NODAR Hammerhead Reference Design (NDR-HDK-2.0-100-10-A), a production-ready hardware and software platform for ultra-wide-baseline stereo vision. The system ships fully assembled and produces high-resolution 3D point clouds out of the box, requiring only a power source and optional display to operate. The cameras can be removed from the enclosure and mounted independently, for example to utilize a longer stereo baseline.
Core System. HDK (NDR-HDK-2.0-100-10-A)
Compute module. Ruggedized NVIDIA Jetson Orin AGX 64 GB. Runs the complete Hammerhead software stack: stereo rectification, autocalibration, stereo matching, and GridDetect obstacle detection. Ubuntu Linux with CUDA acceleration. Integration APIs: C++, Python, and ROS2.
Sensor module. Ultrawide-baseline stereo vision camera pair. 5.4 MP Sony IMX490 sensors, 120+ dB HDR. 1 m baseline bar with cameras removable for custom baselines tested up to 5 m.
Optics. 50 mm lens pair recommended for extended-range detection. Optional dual-lens configuration: 16 mm pair for wide-area situational awareness and 50 mm pair for long-range detection.
Interfaces
(Add-on) Audio alert system. USB audio output to cockpit speaker for audible collision warnings.
(Add-on) Display module. HDMI interface for visual overlay output.
Integration Hardware
Cables and interfacing equipment. Ethernet cabling for camera-to-compute connectivity.
(Custom) Mounting hardware. 1 m baseline bar with ¼-20" tripod holes included. Cameras can be independently mounted at wider baselines for custom airframe installations.
Software Processing Pipeline
Hammerhead processes every frame through a complete four-stage pipeline, turning raw stereo imagery into real-time collision warnings without interruption.
Autocalibration. Patented algorithms correct stereo camera alignment on every frame, compensating for vibration, temperature shifts, and mechanical drift. The system tolerates angular changes of up to 0.1° per frame, eliminating the need for manual recalibration during operation.
Stereo matching. A deterministic signal-processing stereo matching algorithm computes dense disparity maps at up to 50 million depth measurements per second. The algorithm computes true per-pixel depth based on stereoscopic parallax rather than interpolating from sparse features or known objects.
GridDetect obstacle detection. A GPU-accelerated deterministic particle filter converts the dense 3D point cloud into an occupancy grid representation, providing real-time identification of free space and obstacles.
Alert generation. FlightView adds an alert logic layer on top of GridDetect that evaluates detected obstacles against the aircraft's trajectory and speed, computes time-to-collision, and triggers audible cockpit warnings when thresholds are exceeded.

Each frame independently generates a complete obstacle map, and detections are tracked across consecutive frames to filter transient noise and confirm persistent obstacles before triggering an alert. At 10 fps and an operational speed of 120 mph (53.6 m/s), the system produces a new 3D depth measurement approximately every 5.4 m of aircraft travel.
FlightView Resources

FlightView Technical Specification
Full hardware and software specs for the NODAR FlightView collision warning system, including detection performance, environmental ratings, and integration interfaces.

FlightView Solution Brief
An overview of NODAR FlightView — long-range 3D obstacle detection for aviation — covering key capabilities, system architecture, and deployment options.
Technical Specifications
Hardware
parameter
Specification
Camera sensor
Sony IMX490, 5.4 MP (2880 × 1860)
Sensor type
Rolling shutter, 120+ dB HDR
Pixel pitch
3.0 µm
Sensor size
8.64 mm × 5.58 mm
Lens options
7 mm / f/1.6 (65° HFoV), 16 mm / f/1.6 (30° HFoV), 50 mm / f/1.6 (10° HFoV)
Compute unit
NVIDIA Jetson Orin AGX, 64 GB
Frame rate
10 fps (FlightView configuration on Jetson Orin AGX)
Connectivity
Ethernet (camera to ECU)
Mounting
1 m baseline bar with tripod holes (¼-20"); cameras removable for custom baselines
Operating temperature
−25°C to +55°C (Jetson Orin AGX rated range)
Power input
9-36 VDC (Orin AGX)
Power consumption
75 W (max) / 6 W (idle)
Weight
Compute unit 4.2 kg; each camera head 67 g; reference design enclosure with cameras 3.4 kg
¹ Higher framerate dependent on configuration https://docs.nodarsensor.net/benchmarks.html
Hammerhead Performance
parameter
Specification
Autocalibration
Continuous, every frame
Initial camera alignment tolerance
±3° for the initial mounting
Vibration tolerance
up to 0.1° per frame
Stereo matching algorithm
Deterministic signal processing (not learned/neural)
Max throughput
50 million depth pixels/second
Depth precision
0.05%-0.4% at 100 m (depending on baseline and FOV)
Maximum tested range
1,000 m (buildings, trees, aircraft, vehicles)
Baseline support
Tested up to 5 m
GridDetect throughput
100 million 3D points/second
Software platform
Ubuntu 20.04/22.04/24.04, CUDA 11.4–13.0
Integration APIs
C++, Python, ROS2
Output interfaces
Ethernet (API); HDMI (visual overlay); USB audio (speaker)
Stereo Geometry - Detection Range by Lens Configuration
This table shows key stereo parameters for the two lens options optimized for deployment on a small aircraft, with cameras at a 2.5 m baseline with the IMX490 sensor.
parameter
16 mm (wide)
50 mm (tele)
Horizontal field of view
30.2°
9.9°
Vertical field of view
19.8°
6.4°
Coverage at 500 m
270 m × 173 m
86 m × 56 m
Disparity at 500 m
27 px
83 px
Disparity at 1000 m
13 px
42 px
Depth resolution at 500 m (0.25 px sub-pixel)
4.7 m
1.5 m
Depth resolution at 1000 m (0.25 px sub-pixel)
18.8 m
6.0 m
GSD at 500 m
94 mm/px
30 mm/px
Min. detectable object at 500 m (~3 px)
0.28 m
0.09 m
Environmental Conditions
parameter
Specification
Standard / source
Operating temperature
Aetina AIE-PX23 datasheet; Sony IMX490 AEC-Q100
Storage temperature
−40°C to +85°C
Aetina AIE-PX23 datasheet
Humidity
95% @ 40°C, non-condensing
Aetina AIE-PX23 datasheet
Vibration
1 Grms, random, 5–500 Hz, 1 hr/axis
IEC 60068-2-64
Shock
10 G, half sine, 11 ms
IEC 60068-2-27
Certifications
CE / FCC Class A / UKCA
Aetina AIE-PX23
IP rating
Lucid Triton TDR054S-CC datasheet